FlightGear - Création d'avions et autres / Creation of aircraft and other
Vous désirez aider à améliorer les avions de Hangar de Helijah, c'est ici que cela se passe / You would like to help improving aircraft from Helijah's hangar, this is where it happens
Vous n'êtes pas identifié(e).
- Contributions : Récentes | Sans réponse
#1 Re : Ici nous parlons modèles de vol et donc principalement de YASim ! » Départ en lacet intempestif et incontrôlable de certains avions YASim » 2021-04-06 05:49:21
Bonjour a tous,
Je suis aussi depuis très longtemps à la recherche d'une amélioration de la stabilité au roulage sur FG pour les 'tailwheel' principalement. ( Il est vrai que les 'tailwheel' sont 'capricieux' mais pas autant que certaines simulations FG )
Plutôt que de chercher cote ' software', pourquoi ne pas s'inspirer des solutions ' réelles ' ?
Peut être une solution à cette 'instabilité' au roulage : le pincement des roues.

Je teste cette idée des que j ai un peu de temps.
OO ZVY
#2 Ici nous parlons modèles de vol et donc principalement de YASim ! » YASIM invert="true" sur FLAPS » 2020-06-06 20:47:45
- OO ZVY
- Réponses : 2
Bonjour Emmanuel,
Ca fait longtemps....
J' ai 'upgrade' mon simulateur ces derniers jours, et utilisé ton 'P38" pour un petit vol multplayer D-Day ( 'Operation neptune' voir forum FG ) bien sympa.
et.... Je suis tombé sur une 'anomalie' :
J'ai trouvé l'effet des flaps bizarre... donc j'ai regarde le 'YASIM,' et je vois un invert="true".
Avec invert='true', je pense que les flaps agissent 'a l'envers" sur le FDM, un peu comme les volets négatifs des planeurs de performances. Plutôt que d'augmenter la cambrure de l'alie et sa surface ( les flaps vers le bas) , c'estr le contraire qui se passe .....
En supprimant ce invert='true' sur les flaps, le P38 me semble répondre plus naturellement.
( bien sur, il faut aussi enlever le (-) du "factor" dans le xml des flaps pour que le visuel soit dans le bon sens. )
Qu'en penses tu ?
OOZVY

#3 Re : Vous aimeriez un avion, mais il est absent de FG.... Demandez ici » JODEL D140 MOUSQUETAIRE » 2015-01-22 19:04:45
Whaou chouette.
J' ai remorqué dans les années 90 avec un jodel 'abeille' ( OO VVN ) très proche du mousquetaire.
beaucoup de bon souvenirs.
rem : le tableau de bord était beaucoup plus 'primitif...' que sur les photos ci dessus...
OO ZVY
#4 Re : Vous aimeriez un avion, mais il est absent de FG.... Demandez ici » ST-10 Diplomate » 2014-09-29 08:55:15
#5 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-09-20 15:01:06
Bonsoir Emmanuel,
Je ne l'ai pas compilé...
Comme je suis en 'linux mint', j'ai juste utilisé un 'paquet" ubuntu trouvé sur :
http://packages.ubuntu.com/precise/i386 … s/download
J' ai aussi essayé une compilation personnelle, mais sans succès....
amicalement
ZVY
#6 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-09-19 13:42:43
Bonjour à tous,
Intégration de 'ATLAS' dans le tableau de bord :


Maintenant ajouter un arduino pour contrôler le zoom et les options de ATLAS. ( http://www.zem.fr/utiliser-mouse-keyboa … ro-teensy/ )
amicalement
OOZVY
#7 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-09-11 15:26:51
Bonsoir,
encore toujours du carton....

amicalement
OO ZVY
#8 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-09-06 10:45:00
#9 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-09-06 10:15:44
heuuu. plus joli que le carton bien sur.....
![]()
ZVY
#10 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-09-06 09:54:25
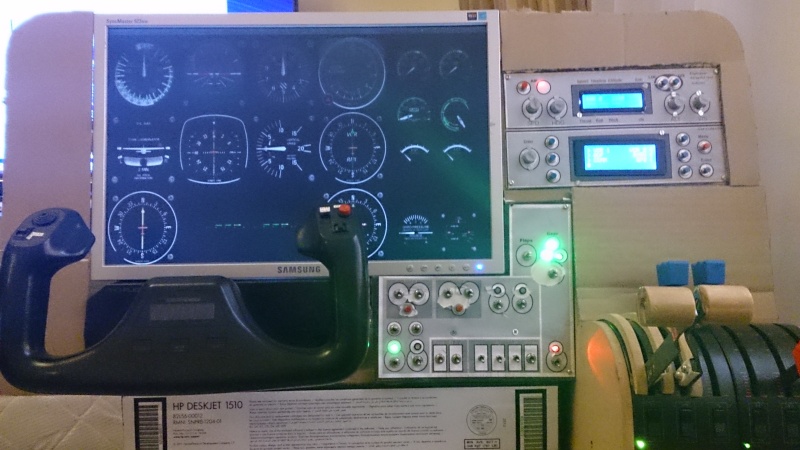
suite ...
Ca commence à ressembler à un 'IFR trainer' non ? ![]()
OOZVY
#11 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2014-06-19 10:48:57
Remontage du prototype après déménagement :


les choses sérieuses reprennent...
amicalement
OOZVY
#12 Re : Ici nous parlons des applications externes en rapport avec FG. » Compilation de FlightGear GIT pour les utilisateurs de GNU/Linux » 2014-04-15 07:42:40
Bonjour,
J ai suivi ce ' tuto' pour réinstaller flightgear ( et plus particulièrement fgpanel ) sur une linux mint 15.
!!!!! CA MARCHE !!!!!!
petites remarques :
- OSG s'installe dans /usr/local/lib64 donc les compilations suivantes ne le trouve pas. Pour faire simple, j' ai recopié tous les fichiers de 'osg' dans /usr/local/lib.
- J' ai la version OpenSceneGraph library 3.3.2 et la compilation de simgear est passée.....
- Pour récupérer les sources, j' ai utilisé la source 'git' et pas 'ssh' . ( ex : git://gitorious.org/fg/simgear.git ISO git@gitorious.org:fg/simgear.git )
- "make" plutôt que "gmake".
merci
Je vais pouvoir 'réparer' mon cockpit.
OOZVY
-
#13 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-10-29 09:55:26
HELLLPPPP !!!!!!!
Linux a mis à jour ma version de flightgear et TOUS mes fichiers de configuration FGPANEL, les instruments modifiés ( RMI), les fichiers de protocole ... ont disparus. ( FG panel aussi à disparu... )
Est il possible de les retrouver ??
merci
OOZVY
#14 Ici nous parlons des applications externes en rapport avec FG. » "head tracking vew control" » 2013-10-01 11:01:09
- OO ZVY
- Réponses : 5
Bonjour,
petite démo d'un prototype du contrôle visuel par les mouvement de la tête. ( via une petite plate forme inertielle et un arduino )...
amicalement
OOZVY
#15 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-09-06 17:30:58
suite... les commandes de flaps, train, magneto, starter, lampes, pitot, fuel pumps, electric, et des petites leds... ![]()

amicalement
ZVY
#16 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-08-08 15:21:40
et cerise sur le gateau, toutes les property existent dans FG donc rien a ajouter, on ne peu plus propre....
#17 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-08-08 15:19:01
Bonjour, Merci pour ces réponses & solution !!! à mon problème
Petite explication plus claire : 
Sur le VOR RMI, il faut faire tourner la rose de cette valeur :
.... <property>orientation/heading-magnetic-deg</property>
et faire bouger l'aiguille vers la bonne direction, soit ceci
.../nav[0] MOINS la rotation de la rose soit .../heading-magnetic-deg car on a DEJA fait tourné la rose en arrière plan.
ce que fait parfaitement ce petit bout de .xml avec le factor <-1>.
<animation>
<type>rotate</type>
<object-name>RMI.Needle1</object-name>
<property>orientation/heading-magnetic-deg</property>
<factor>-1</factor>
<axis>
<x>-1</x>
<y>0</y>
<z>0</z>
</axis>
</animation>
<animation>
<type>rotate</type>
<object-name>RMI.Needle1</object-name>
<property>/instrumentation/nav[0]/heading-deg</property>
<axis>
<x>-1</x>
<y>0</y>
<z>0</z>
</axis>
</animation>
MERCIIII
PHILIPPE
#18 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-08-07 19:01:29
Bonjour Emmanuel,
Pour ajouter un 'VOR - RMI' dans FG Panel, je dois soustraire 2 propriétés pour calculer un 'gisement'.
En fait calculer la différence entre le CAP de l'avion < propriété : CAP > et la route vers la balise VOR < propriété BALISE > pour calculer le gisement à afficher sur l'instrument soit < propriété GISEMENT >
donc quelque chose comme : <GISEMENT> = <CAP> - <BALISE>
Ce doit être possible de le faire dans le fichier .xml de cet instrument mais avec quelle syntaxe ????
help help
merci
Philippe
#19 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-08-06 18:29:47
suite.... avec FGpanel :


![]()
![]()
OOZVY
#20 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-07-13 18:44:54
ça avance doucement...


amicalement
ZVY
#21 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-07-05 13:10:32
Bonjour Emmanuel,
Je fabrique le prototype .... mais je cherche un TRES TRES TRES bon commercial pour le vendre ![]()
![]()
Plus sérieusement, L'objectif ( mais il reste bcp de chemin ) est de fabriquer un petit cockpit AMATEUR pour en faire un " IFR trainer" probablement sur base d' un bimoteur léger type Cessna 421...
Avec FGpanel, j'ai une base de départ pour les instruments et l'Arduino me permet de faire toutes les entrées/sorties nécessaire. ( pour les interrupteurs , switches, radio panel etc... )
donc y a plus qu'à..... comme ton cockpit de TU134...
bon WE
Philippe
#22 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-07-05 11:35:48
Bonjour,
suite....
Bgrs
OOZVY
#23 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-06-30 13:22:46
bonjour,
Début du panneau NAV/COM :

amicalement
ZVY
#24 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-06-21 09:10:46
Bonjour à tous,
L’électronique est en bonne voie donc, maintenant, un peu de 'design' ![]()
Dessin de la 'console centrale': 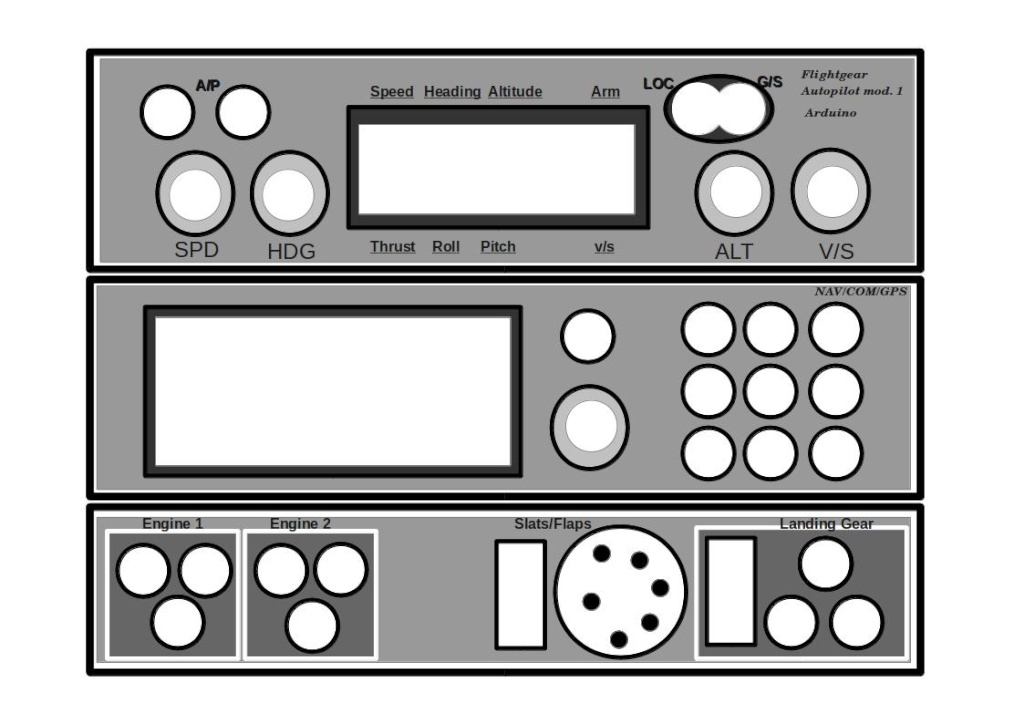
soit sur sur le prototype :
A/P off : 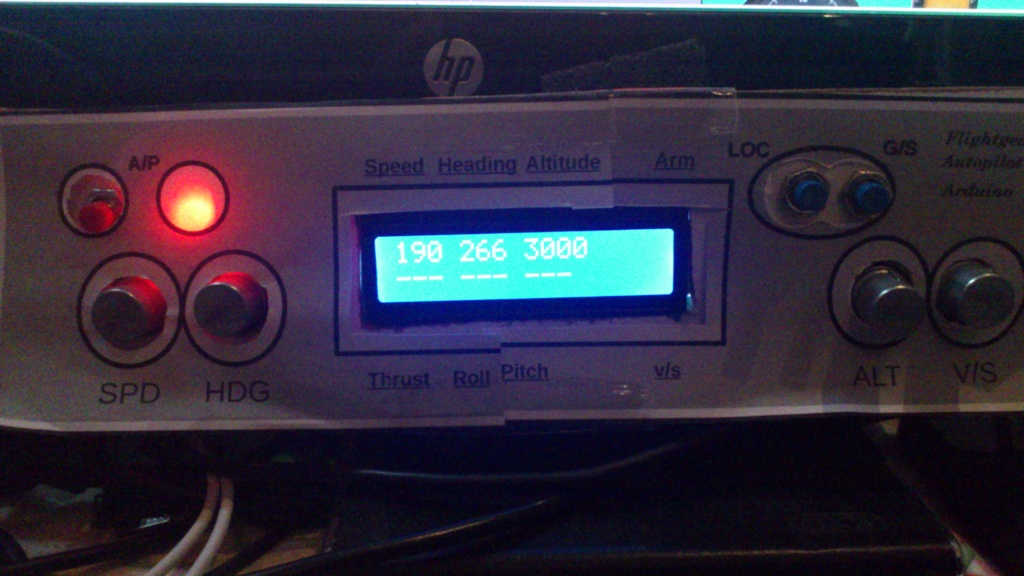
A/P ON en montée 1000 fts/min vers 4000 fts vitesse 250 kts cap 359 deg.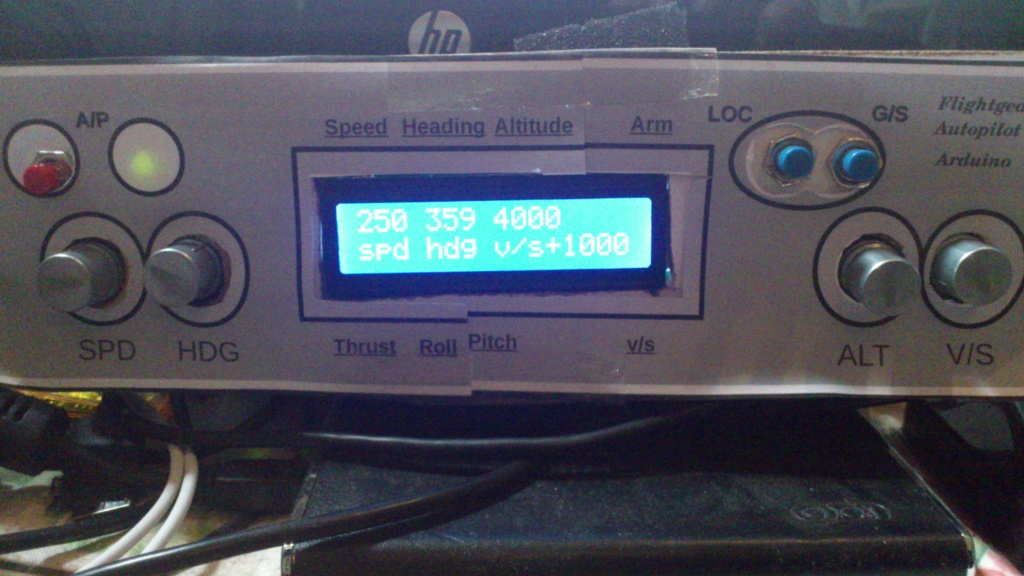
salut Philippe, si tu veux je peux regarder si je vois ou est le pb !!! (tu me passes tes fichiers et je les épluche)
tu passes juste par un fichier protocole xml ou tu as du nasal en plus ??Pas de nasal, juste un protocole série in et un out. ( Donc pas de modification nécessaire au niveau des avions et uniquement transmission des paramètres vers l' AP générique de FG )
le protocole Arduino vers FG :
<?xml version="1.0"?>
<PropertyList>
<generic>
<input>
<line_separator>newline</line_separator>
<var_separator>,</var_separator>
<chunk>
<name>start</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/start</node>
</chunk>
<chunk>
<name>altitude</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/target-altitude-ft</node>
</chunk>
<chunk>
<name>cap</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/heading-bug-deg</node>
</chunk>
<chunk>
<name>vitesse</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/target-speed-kt</node>
</chunk>
<chunk>
<name>vs</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/vertical-speed-fpm</node>
</chunk>
<chunk>
<name>modealti</name>
<type>string</type>
<format>%s</format>
<node>/autopilot/locks/altitude</node>
</chunk>
<chunk>
<name>moderoll</name>
<type>string</type>
<format>%s</format>
<node>/autopilot/locks/heading</node>
</chunk>
<chunk>
<name>modethrust</name>
<type>string</type>
<format>%s</format>
<node>/autopilot/locks/speed</node>
</chunk>
</input>
</generic>
</PropertyList>le protocole FG vers ARduino ( pour avoir les données nécessaires à l'armement des modes de capture altitude, loc et GS ):
<?xml version="1.0"?>
<PropertyList>
<generic>
<output>
<line_separator>newline</line_separator>
<var_separator>,</var_separator>
<chunk>
<name>loc</name>
<format>%d</format>
<node>/instrumentation/nav/heading-needle-deflection</node>
</chunk>
<chunk>
<name>gs</name>
<format>%d</format>
<node>/instrumentation/nav/gs-needle-deflection</node>
</chunk>
<chunk>
<name>altitude</name>
<format>%d</format>
<node>/position/altitude-ft</node>
</chunk>
<chunk>
<name>GSservicability</name>
<format>%d</format>
<node>/instrumentation/nav/gs-in-range</node>
</chunk>
<chunk>
<name>varioout</name>
<format>%d</format>
<node>/autopilot/internal/vert-speed-fpm</node>
</chunk>
<chunk>
<name>speedout</name>
<format>%d</format>
<node>/instrumentation/airspeed-indicator/indicated-speed-kt</node>
</chunk>
</output>
</generic>
</PropertyList>L'arduino se charge des boutons poussoirs, encodeur rotatif, leds, écran LCD, envois des paramètres vers l' AP de FG !!! MAIS AUSSI aussi de la logique de capture glide slope, localiser ou altitude.
amicalement
OOZVY
#25 Re : Si un instrument manque dans FG pourquoi ne pas le faire » Arduino / tableau de bord DIY FG. » 2013-06-19 18:27:29
Bonsoir,
Le 'plat de Spaghetti' ( avec le module comm. supplémentaire ): 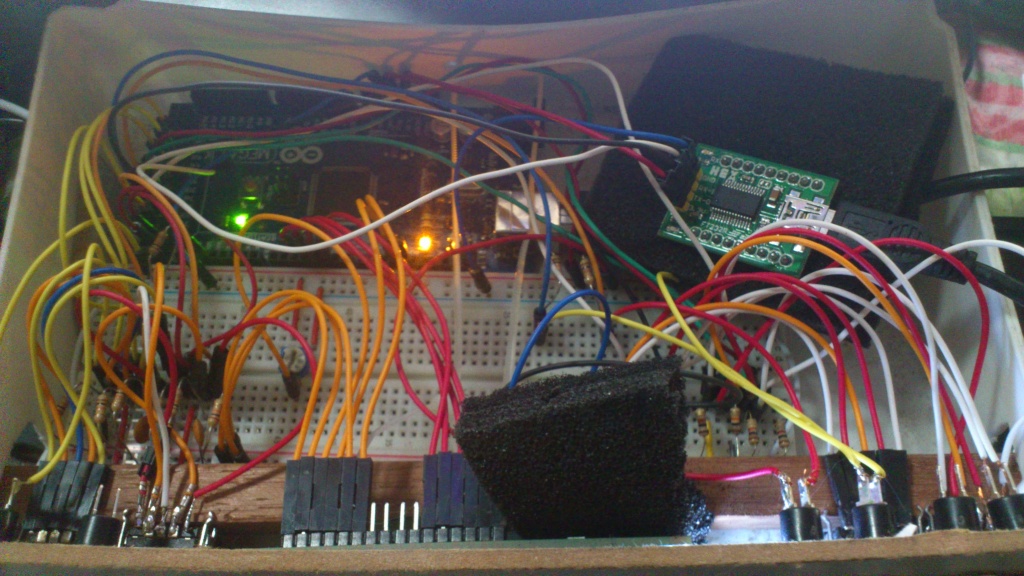
Avec 2 ports série ( un pour < in> et un pour <out> ) ça marche !!!
Un petit vol en BZ 308 pour essayer... ( pas très fiable les moteurs de l'époque ![]() )
)
en approche, après capture du 'localiser' en attente du 'glide slope' :
Sur le 'Loc' et sur le 'Glide' :
amicalement
OOZVY