FlightGear - Création d'avions et autres / Creation of aircraft and other
Vous désirez aider à améliorer les avions de Hangar de Helijah, c'est ici que cela se passe / You would like to help improving aircraft from Helijah's hangar, this is where it happens
Vous n'êtes pas identifié(e).
- Contributions : Récentes | Sans réponse
#1 2013-05-03 15:04:48
- OO ZVY
- Créateur

- Inscription : 2011-12-14
- Messages : 127
Arduino / tableau de bord DIY FG.
Bonjour,
Petite vidéo d'un début ( mais alors vraiment début ) de réalisation d'instrument pour cockpit simulateur FG.
objectif : réaliser un boîtier de commande pour l' AP de FG.
étape 1 :
choix des composants : un 'ARDUINO' semble parfait. ( communique sur le port série USB, programmable en quelque chose proche du C, avec plein de connections digitales entrée/sortie et analogiques ![]() )
)
test 1 : commander le 'heading bug' de l' AP de FG et afficher les présélections.
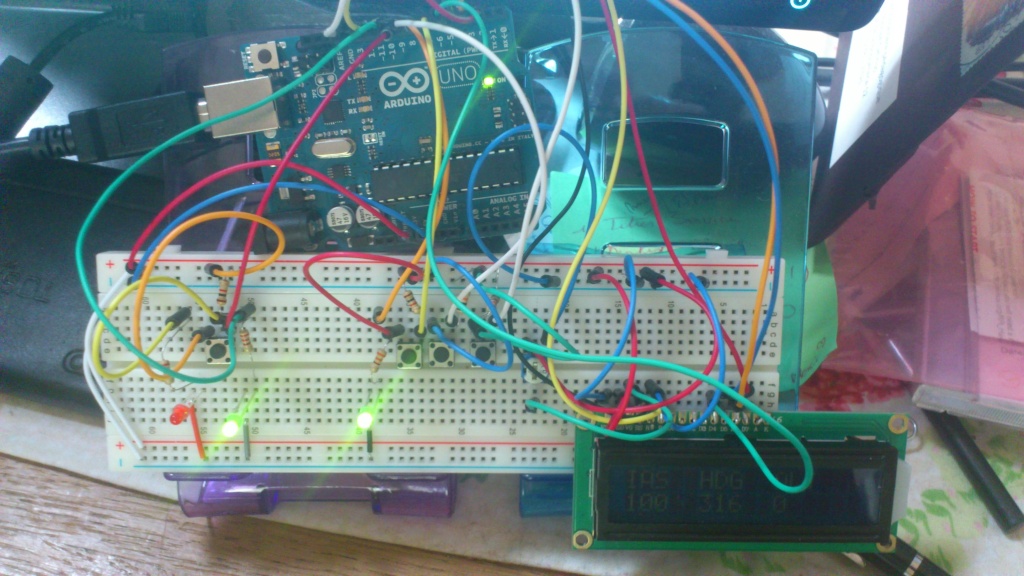
![]()
![]()
![]()
étape 2 :
Remplacer les boutons poussoir par des' rotary encoder'.
Ajouter le code et le hardware pour la commander la vitesse, l' altitude, le VS, des boutons pour engager/désengager les modes et installer tout ceci dans un petit boitier :-)
amicalement
Philippe
Dernière modification par OO ZVY (2013-05-03 16:08:51)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#2 2013-05-03 17:05:56
- algajojo
- Membre
- Inscription : 2011-12-14
- Messages : 44
Re : Arduino / tableau de bord DIY FG.
salut Philippe,
mais c'est super ton "truc" !!!!!!!!!!!!
comment tu gères le dialogue FG <----> truc ?
amicalement
georges
Dernière modification par algajojo (2013-05-03 17:06:22)
Hors ligne
#3 2013-05-04 10:19:42
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
Bonjour,
assez simplement via des fichiers .xml <--> 'protocol' et le port serie ( USB )

une petite idée sur ce site : http://playground.arduino.cc/Main/FlightGear
ou plus précis pour du input et/ou output : http://garagelab.com/profiles/blogs/tut … rt-2-input
et le arduino se programme via un petit logiciel ( linux, windows ou OSX ) qui s'occupe de la compilation et du transfert du code vers le 'truc'.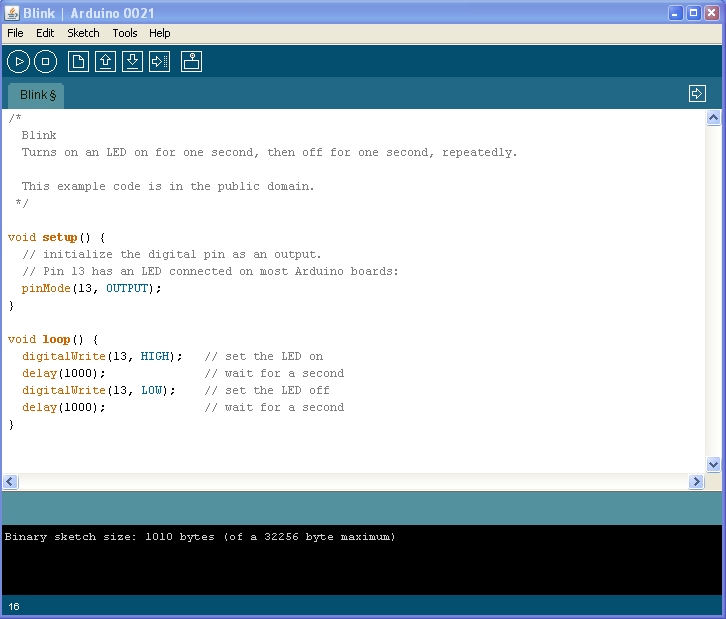
amicalement
ZVY
rem : les lignes à ajouter dans le fichier .fgfsc type 'linux' pour le port serie :
--generic=serial,in,5,/dev/ttyACM0,9600,autopilot-beta1-in
--generic=serial,out,5,/dev/ttyACM0,9600,autopilot-beta1-out
Dernière modification par OO ZVY (2013-05-04 10:25:42)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#4 2013-05-04 16:27:56
- algajojo
- Membre
- Inscription : 2011-12-14
- Messages : 44
Re : Arduino / tableau de bord DIY FG.
très intéressant !!!!!!
en fait c'est le soft qui gère les entrées/sorties série de FG vers l'USB !!!
Tiens nous au courant de tes progrès.
J'avoue que sur le site arduino j'ai pas bien vu/compris ce qu'on pouvait brancher sur la carte !!!!!
Peux tu préciser ce que tu as acheté pour commencer tes TP ??
amicalement
georges
Hors ligne
#5 2013-05-04 17:05:48

Re : Arduino / tableau de bord DIY FG.
Salut Philippe,
Super intéressant effectivement ![]()
Alors Georges toujours à l'affut d'info pour les entrée sorties ? ![]() Et ce projet de siège sur vérins ?
Et ce projet de siège sur vérins ?
Amicalement Emmanuel
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#6 2013-05-04 18:57:55
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
Bonsoir,
oui pour faire simple :
En sortie ( data depuis FG vers le 'truc' ) on a
1. un appel du protocole par .fgfsc
--generic=serial,out,5,/dev/ttyACM0,9600,autopilot-beta1-out
2. le fichier protocole FG en "output" ( ici autopilot-beta1-out.xml à placer ou il se doit dans l' arborescence FG )
<?xml version="1.0"?>
<PropertyList>
<generic>
<output>
<line_separator>newline</line_separator>
<var_separator>newline</var_separator>
<chunk>
<name>park</name>
<format>%d</format>
<node>/controls/gear/brake-parking</node>
</chunk>
</output>
</generic>
</PropertyList>
3. la routine à insérer dans le ''truc'' , qui dans ce cas va LIRE le port série et pourquoi pas suivant la valeur lue commander un moteur pas à pas par exemple :
....
void loop() {
// see if there's incoming serial data:
if (Serial.available() > 0) {
// read the oldest byte in the serial buffer:
incomingByte = Serial.read();
... blablabla ....
}
... reblablabla et comparaison etc.. etc ...
if (.......)
//on avance de 100 pas
Moteur1.move(100);
Moteur1.move(0); //Arreter l'alimentation
delay(1000);
else (......)
//on recule de 100 pas
Moteur1.move(-100);
Moteur1.move(0); //Arreter l'alimentation
delay(1000);
}
}
ceci pour donner une idée de l'ensemble.
Pour l'entrée de donnée ( depuis le truc vers FG ) , même principe à l'envers : le arduino va écrire sur le port série et FG va utiliser le protocole en <input>.
OOZVY
Petit aperçu du hardware :
J' ai acheté un kit arduino UNO sur EBAY pour avoir un petit assortiment de composants pour commencer. ( http://www.befr.ebay.be/itm/12094895952 … 1497.l2649 )
MMAIISSS pour la réalisation d'un AP il faut plus d'entrée/sortie que sur le 'UNO' qui n'en a que 14 donc je vais commander le arduino mega 2560 qui lui a une 50aine de broches in/out )
Dernière modification par OO ZVY (2013-05-04 19:02:24)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#7 2013-05-04 21:59:13
- algajojo
- Membre
- Inscription : 2011-12-14
- Messages : 44
Re : Arduino / tableau de bord DIY FG.
Salut Philippe,
Alors Georges toujours à l'affut d'info pour les entrée sorties ?Et ce projet de siège sur vérins ?
Amicalement Emmanuel
salut Emmanuel,
oui toujours à l'affut car ce projet de plateforme mobile m'avais bien plu !!!!
malheureusement comme je ne pouvais pas avancer plus et que le modèle voulu par Alain (le concepteur de la plateforme) ne pouvait plus avancer non plus bin ça a capoté !!!!!!
Mais ce que présente Philippe me ravive les neurones et j'ai bien envie de m'y remettre, pas sur une plateforme mais plutôt sur de l'instrumentation !!!!
Car ce que j'avais vu à l'époque chez simkit (de mémoire) m'avait frustré (proprio F$).
oups je me rend compte que je ne t'avais pas remercié pour tes infos !!!!!
donc merci Philippe !!!!!!!
amicalement
georges
Dernière modification par algajojo (2013-05-05 18:05:53)
Hors ligne
#8 2013-05-11 13:13:14
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
Bonjour,
Une photo du boîtier 'test'.... Ne faites pas attention à la précision des découpes..... ![]()
encodeur rotatif, de gauche à droite : vitesse, cap, altitude et vertical speed.
push sur les encodeurs : cap -> mode heading select, altitude -> altitude hold, vertical speed -> vertical speed
Boutons bleu dans l'ordre speed thurst et speed pitch, nav, vor/loc, Lvl chg et finalement G/S.
Bouton rouge autopilote on/off.

je dois encore ajouter les 'leds...'
amicalement
ZVY
Dernière modification par OO ZVY (2013-05-11 13:13:56)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#9 2013-05-11 13:52:09
- Didier1963
- Developpeur

- Lieu : Bordeaux
- Inscription : 2012-10-24
- Messages : 1 238
Re : Arduino / tableau de bord DIY FG.
Salut Philippe,
hé bien, il avance bien ton cockpit d'A380!!
Hein ? c'est pas prévu ? Ha, domage !
Aller, pour revenir au sérieux, il est en quoi ton boitier, plastique ou métal?
Comment tu prévoit l'emplacement des trous à percer?
Comment as tu percé le trous pour l'afficheur?
Est-ce que tu fait une esquisse sur papier à petit carreaux et que tu reproduit ensuite sur ta façade ou est-ce direct au feeling?
Tu alimante par le port USB ou il y a une alim séparée?
Pour ma part, je lorgne plus sur quelque chose de totalement virtuel (tout les panneaux et instrus sur écrans, vu que j'en ai 3).
Par contre je n'ai pas encore approfondi la question vu que je suis busy avec le décorticage de l'organisation des fichier xml pour ma Caravelle et l'Akoya.
J'ai lu quelque part en cherchant autre chose que c'était possible en mettant en place un système serveur-client sur le même PC, mais je préférerait trouver quelque chose de plus souple........ avis aux connaisseurs pour quelques pistes!
Pourquoi cet avatar : il a réussi à les arrêter LUI au moins.......
Amicalement, Didier, Poitiers 86; LFBI alt 129m, 46°35'22.9"N 0°18'32.7"E
"Ils ne savaient pas que c'était impossible, alors ils l'on fait" Marc Twain
Hors ligne
#10 2013-05-11 14:41:59
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
heuuu....
plastique ou métal?
> perdu ! petit panneau de bois pour la façade et une vieille boite à tartine pour le reste.....
Comment tu prévoit l'emplacement des trous à percer?
> petit croquis sur papier mais j' ai pas eu le 'compas dans l’œil" pour le bouton rouge....
Comment as tu percé le trous pour l'afficheur?
> Scie sauteuse.
Est-ce que tu fait une esquisse sur papier à petit carreaux et que tu reproduit ensuite sur ta façade ou est-ce direct au feeling?
> voir ci dessus, petite esquisse sur papier.
Tu alimente par le port USB ou il y a une alim séparée
> pour le moment par USB, mais l'afficheur est un peu 'pâle' avec 5v.
amicalement
ZVY
Dernière modification par OO ZVY (2013-05-11 14:43:19)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#11 2013-05-11 15:59:39
Re : Arduino / tableau de bord DIY FG.
Salut Philippe
J'en connais un qui va finir par ne plus entrer dans un vrai 737 à ce rythme lol
Amicalement Emmanuel
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#12 2013-05-11 16:02:52
- Didier1963
- Developpeur
- Lieu : Bordeaux
- Inscription : 2012-10-24
- Messages : 1 238
Re : Arduino / tableau de bord DIY FG.
Ha, oui, la photo est un peu floue et je n'avait pas vu que la façade était faite dans du bois compressé type NOVOPAN.
C'est sur que pour obtenir quelque chose de net avec ce genre de matériau, dur dur.
Mais c'est vrai que pour un boitier d'essais, c'est largement suffisant. As tu essayé de découper la fenêtre au cutter?
Par-ce que la scie sauteuse, c'est du lourd non?
Et donc, c'est quoi le prochain instru?
Pourquoi cet avatar : il a réussi à les arrêter LUI au moins.......
Amicalement, Didier, Poitiers 86; LFBI alt 129m, 46°35'22.9"N 0°18'32.7"E
"Ils ne savaient pas que c'était impossible, alors ils l'on fait" Marc Twain
Hors ligne
#13 2013-05-11 16:20:26
Re : Arduino / tableau de bord DIY FG.
As tu essayé de découper la fenêtre au cutter?
Mais mais..... Ca va pas non ? Et pourquoi Philippe ferais un trou dans sa fenêtre au cutter ? Plus simple et moins risqué de simplement l'ouvrir non ? Et puis si le froid revient il faudra boucher le trou en plus ! AAAAAHHHHH La la !
Ok je sort !
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#14 2013-05-22 16:23:59
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
bonjour à tous,
le projet avance doucement.
les sélecteurs ( reste un peu de 'rebond' ), boutons et les modes de l' AP par défaut de FG fonctionnent.
J' ai un petit problème concernant les entrée/sortie série. Tant que je ne fais que 'donner des ordres' à FG depuis mon module, pas de problème. Si j'essaye une communication bidirectionnelle ( pour envoyer aussi des infos depuis FG vers l'Arduino ) , ça plante.
Une petite recherche sur le net laisse à penser que le problème viens d' un bug dans cette communication bi. série.
La parade possible est d'installer 2 port com, un pour le in et un pour le out ... mais si quelqu'un à une meilleure idée je suis preneur ... ![]()
![]()
amicalement
OO ZVY
rem : le prochain sera probablement un récepteur VOR/ILS/VHF. - ADF ( facile à réaliser ) ou un panneau de base ( magnetos, gear, flaps, lights, trim... ) à voir
Dernière modification par OO ZVY (2013-05-22 16:28:09)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#15 2013-05-22 16:56:37
Re : Arduino / tableau de bord DIY FG.
Waooooooo !
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#16 2013-05-23 16:10:12
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
Bonjour,
Petite démo ( pour jouer ) de l'Arduino avec 2 servo moteurs. ( pitch et roll de la maquette 737 rouge ) ---> la plate-forme de Georges ??
La maquette vibre beaucoup à cause du fil de fer qui fait un peu ressort.
amicalement
Philippe
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#17 2013-05-23 17:28:50
- algajojo
- Membre
- Inscription : 2011-12-14
- Messages : 44
Re : Arduino / tableau de bord DIY FG.
bonsoir à tous,
J' ai un petit problème concernant les entrée/sortie série. Tant que je ne fais que 'donner des ordres' à FG depuis mon module, pas de problème. Si j'essaye une communication bidirectionnelle ( pour envoyer aussi des infos depuis FG vers l'Arduino ) , ça plante.
Une petite recherche sur le net laisse à penser que le problème viens d' un bug dans cette communication bi. série.La parade possible est d'installer 2 port com, un pour le in et un pour le out ... mais si quelqu'un à une meilleure idée je suis preneur ...

salut Philippe, si tu veux je peux regarder si je vois ou est le pb !!! (tu me passes tes fichiers et je les épluche)
tu passes juste par un fichier protocole xml ou tu as du nasal en plus ??
Bonjour,
Petite démo ( pour jouer ) de l'Arduino avec 2 servo moteurs. ( pitch et roll de la maquette 737 rouge ) ---> la plate-forme de Georges ??
La maquette vibre beaucoup à cause du fil de fer qui fait un peu ressort.
amicalement
Philippe
Bravo, c'est à peu prêt ça !!!
décidément ça me plait de + en + ton "truc"
amicalement
georges
Hors ligne
#18 2013-05-23 18:26:28
- Didier1963
- Developpeur
- Lieu : Bordeaux
- Inscription : 2012-10-24
- Messages : 1 238
Re : Arduino / tableau de bord DIY FG.
Wooooaaaaaa !
super !
et comment tu fait pour les tonneaux ????
Pourquoi cet avatar : il a réussi à les arrêter LUI au moins.......
Amicalement, Didier, Poitiers 86; LFBI alt 129m, 46°35'22.9"N 0°18'32.7"E
"Ils ne savaient pas que c'était impossible, alors ils l'on fait" Marc Twain
Hors ligne
#19 2013-05-23 19:31:29
Re : Arduino / tableau de bord DIY FG.
et comment tu fait pour les tonneaux ????
Bin ... heu... comment dire.... Il faut un trou en bas, il met un robinet et.... et... et il se rince le gosier avec plaisir et surtout modération........ C'est bien fait pour cela les tonneaux non ?
OK je sort -> []
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#20 2013-05-23 20:15:18
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
heuuuu ceux ci ????
http://aviation.maisons-champagne.com/d … ur&menu=01
....
Pour former ses pilotes à ce nouveau mécanisme complexe, l'ingénieur Levavasseur et son équipe formidable équipe de Mourmelon-en-Champagne avec Latham comme chef pilote inventent alors le premier simulateur de vol du Monde !
Ce 1ersimulateur de vol du Monde était un tonneau scié en deux à l'équateur et remonté en sens inverse, la moitié du dessus-dessous formant pied (cf images ci-dessous). Il avait été imaginé et expérimenté sur l’initiative de 3 des élèves pilotes militaires : les commandants Georges Clolus, Alex Laffont et le lieutenant Pierre Clavenad.
Léon Levavasseur réalise (grâce à l’initiative de ses élèves) le 1er appareil d’entraînement pour l’instruction au sol au pilotage de ses avions Antoinette.

Le "tonneau Antoinette" est le premier simulateur de vol d’avions du Monde.
![]()
Dernière modification par OO ZVY (2013-05-23 20:16:02)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#21 2013-05-24 04:22:27
Re : Arduino / tableau de bord DIY FG.
Hé hé je n'avais pas pensé à celui là (même si je le connaissais ![]() ). Mais bon la réponse me clou le bec lol
). Mais bon la réponse me clou le bec lol
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#22 2013-06-19 18:27:29
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
Bonsoir,
Le 'plat de Spaghetti' ( avec le module comm. supplémentaire ): 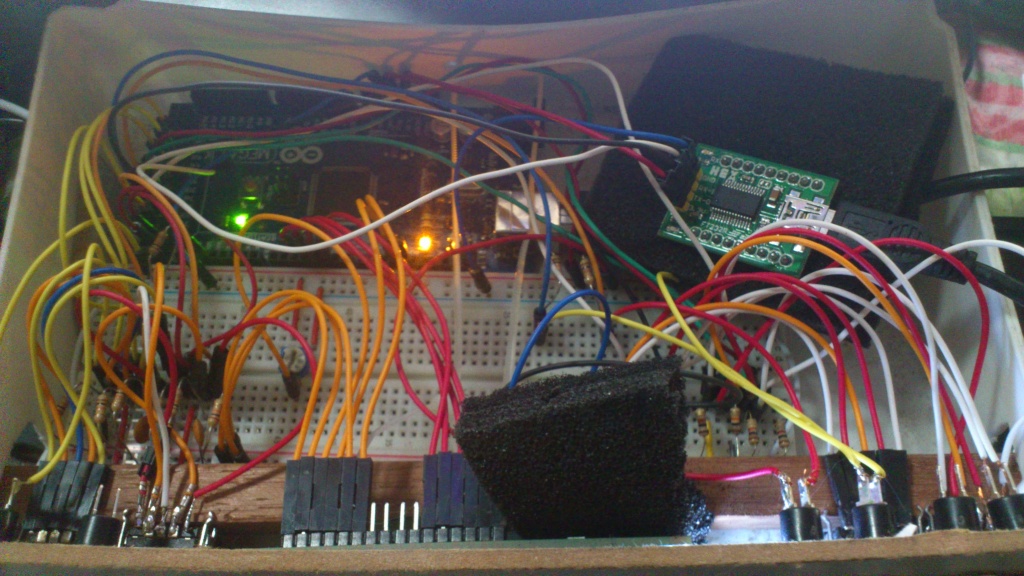
Avec 2 ports série ( un pour < in> et un pour <out> ) ça marche !!!
Un petit vol en BZ 308 pour essayer... ( pas très fiable les moteurs de l'époque ![]() )
)
en approche, après capture du 'localiser' en attente du 'glide slope' :
Sur le 'Loc' et sur le 'Glide' :
amicalement
OOZVY
Dernière modification par OO ZVY (2013-06-21 09:39:52)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#23 2013-06-19 18:55:59
Re : Arduino / tableau de bord DIY FG.
![]() Impressionnant
Impressionnant ![]() Et heureux de voir que mes modestes modèles continuent de servir
Et heureux de voir que mes modestes modèles continuent de servir ![]() Le prochain devrait t'amuser aussi d'ailleurs
Le prochain devrait t'amuser aussi d'ailleurs ![]() Voir le He 177 dans la section "Demande de nouveaux avions"
Voir le He 177 dans la section "Demande de nouveaux avions"
Amicalement Emmanuel
Quelques avions pour FlightGear
http://helijah.free.fr
Hors ligne
#24 2013-06-21 09:10:46
- OO ZVY
- Créateur
- Inscription : 2011-12-14
- Messages : 127
Re : Arduino / tableau de bord DIY FG.
Bonjour à tous,
L’électronique est en bonne voie donc, maintenant, un peu de 'design' ![]()
Dessin de la 'console centrale': 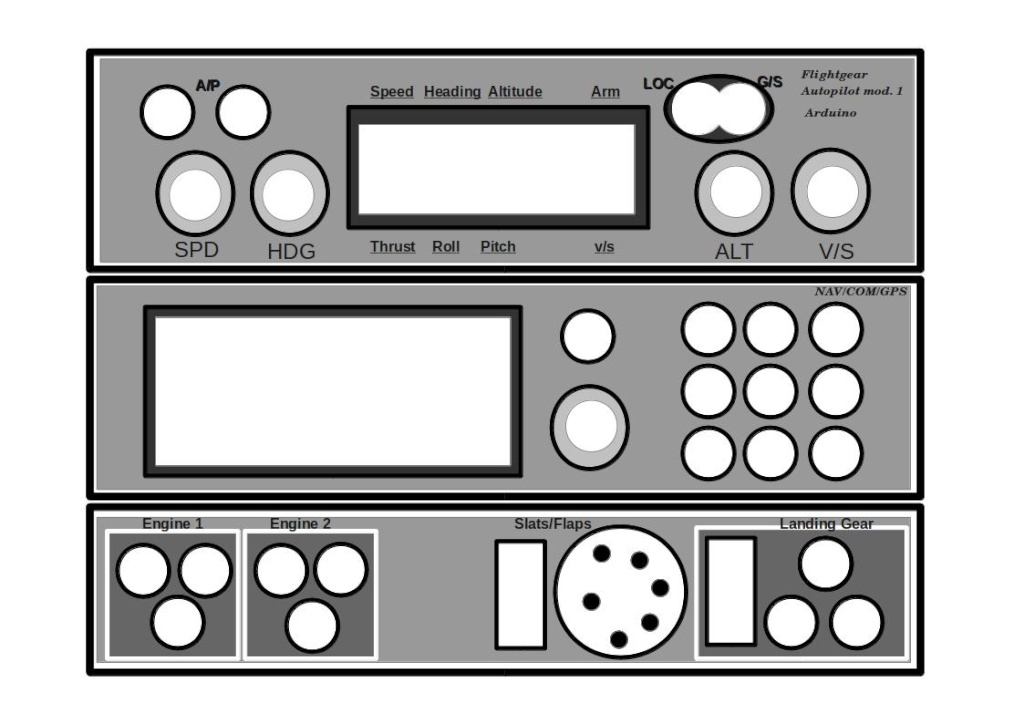
soit sur sur le prototype :
A/P off : 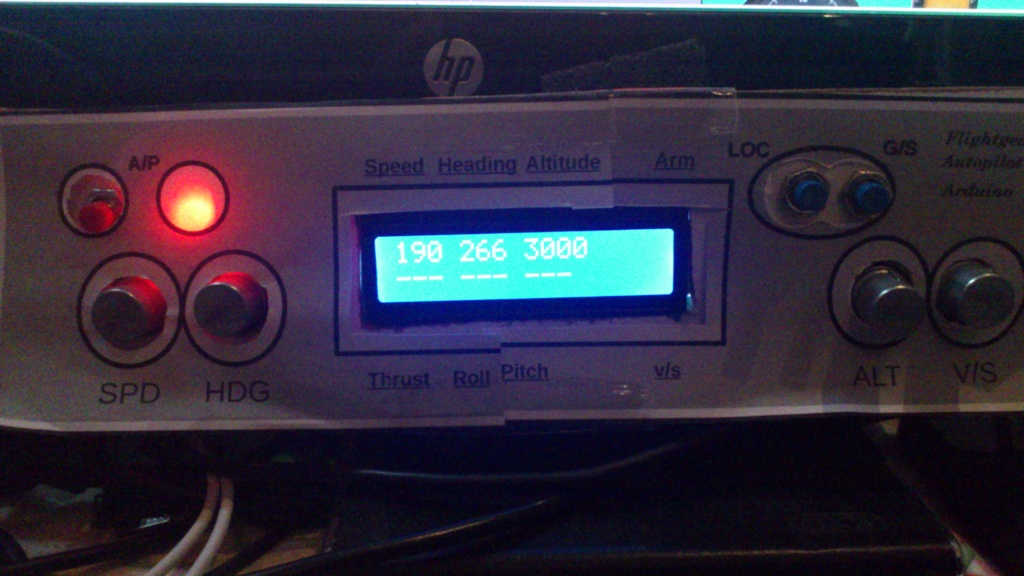
A/P ON en montée 1000 fts/min vers 4000 fts vitesse 250 kts cap 359 deg.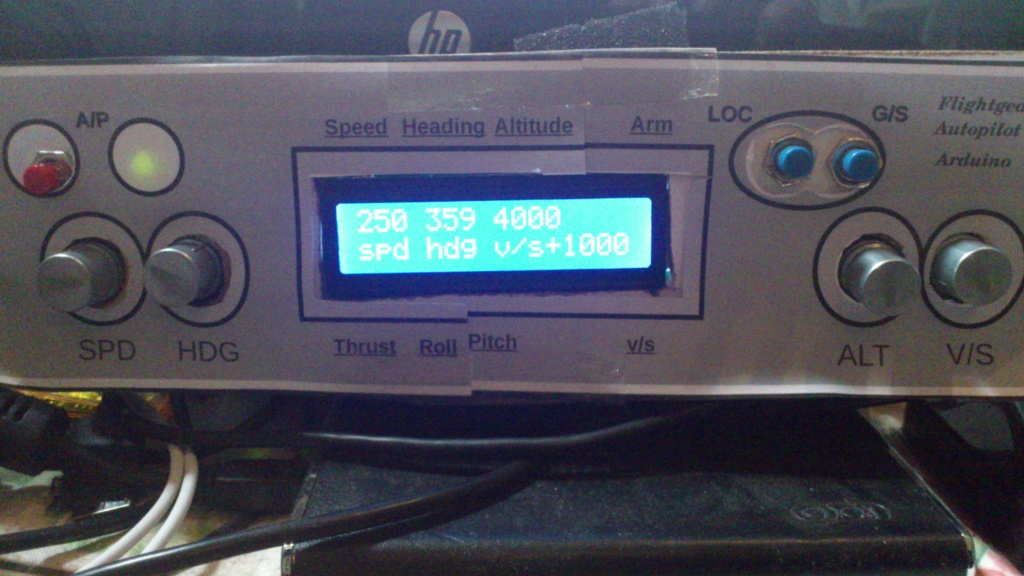
salut Philippe, si tu veux je peux regarder si je vois ou est le pb !!! (tu me passes tes fichiers et je les épluche)
tu passes juste par un fichier protocole xml ou tu as du nasal en plus ??Pas de nasal, juste un protocole série in et un out. ( Donc pas de modification nécessaire au niveau des avions et uniquement transmission des paramètres vers l' AP générique de FG )
le protocole Arduino vers FG :
<?xml version="1.0"?>
<PropertyList>
<generic>
<input>
<line_separator>newline</line_separator>
<var_separator>,</var_separator>
<chunk>
<name>start</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/start</node>
</chunk>
<chunk>
<name>altitude</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/target-altitude-ft</node>
</chunk>
<chunk>
<name>cap</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/heading-bug-deg</node>
</chunk>
<chunk>
<name>vitesse</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/target-speed-kt</node>
</chunk>
<chunk>
<name>vs</name>
<type>integer</type>
<format>%s</format>
<node>/autopilot/settings/vertical-speed-fpm</node>
</chunk>
<chunk>
<name>modealti</name>
<type>string</type>
<format>%s</format>
<node>/autopilot/locks/altitude</node>
</chunk>
<chunk>
<name>moderoll</name>
<type>string</type>
<format>%s</format>
<node>/autopilot/locks/heading</node>
</chunk>
<chunk>
<name>modethrust</name>
<type>string</type>
<format>%s</format>
<node>/autopilot/locks/speed</node>
</chunk>
</input>
</generic>
</PropertyList>le protocole FG vers ARduino ( pour avoir les données nécessaires à l'armement des modes de capture altitude, loc et GS ):
<?xml version="1.0"?>
<PropertyList>
<generic>
<output>
<line_separator>newline</line_separator>
<var_separator>,</var_separator>
<chunk>
<name>loc</name>
<format>%d</format>
<node>/instrumentation/nav/heading-needle-deflection</node>
</chunk>
<chunk>
<name>gs</name>
<format>%d</format>
<node>/instrumentation/nav/gs-needle-deflection</node>
</chunk>
<chunk>
<name>altitude</name>
<format>%d</format>
<node>/position/altitude-ft</node>
</chunk>
<chunk>
<name>GSservicability</name>
<format>%d</format>
<node>/instrumentation/nav/gs-in-range</node>
</chunk>
<chunk>
<name>varioout</name>
<format>%d</format>
<node>/autopilot/internal/vert-speed-fpm</node>
</chunk>
<chunk>
<name>speedout</name>
<format>%d</format>
<node>/instrumentation/airspeed-indicator/indicated-speed-kt</node>
</chunk>
</output>
</generic>
</PropertyList>L'arduino se charge des boutons poussoirs, encodeur rotatif, leds, écran LCD, envois des paramètres vers l' AP de FG !!! MAIS AUSSI aussi de la logique de capture glide slope, localiser ou altitude.
amicalement
OOZVY
Dernière modification par OO ZVY (2013-06-21 09:50:52)
OO ZVY
Ubuntu 18.04 LTS
Flightgear V 2019.1.2
Hors ligne
#25 2013-06-21 10:56:32
- Didier1963
- Developpeur
- Lieu : Bordeaux
- Inscription : 2012-10-24
- Messages : 1 238
Re : Arduino / tableau de bord DIY FG.
Bravo,
ca y est !!! J'ai trouvé qui va pouvoir nous aider à faire les boitiers de commandes et fusible pour l'Akoya !!!! ![]()
![]()
Bon, plus sérieusement,
ça à de la gueule et ça fonctionne bien !!
Tu connaît une boite qui peu te sérigraphier tes fututres façades?
Reste plus qu'a trouver un nom et un joli logo pour ta société, un nom qui sonne bien pour l'apareil, et le faire produire à taïwan ! ![]()
Pourquoi cet avatar : il a réussi à les arrêter LUI au moins.......
Amicalement, Didier, Poitiers 86; LFBI alt 129m, 46°35'22.9"N 0°18'32.7"E
"Ils ne savaient pas que c'était impossible, alors ils l'on fait" Marc Twain
Hors ligne