apparemment, mon animation du 6Q11 fait des petits, j'ai eu une demande pour le Rotax sur "l'autre" forum, donc voilà:
je viens de finir les cylindres et les ppistons, les screenshots plus tard dans la soirée.....
]]>Le moteur est rentré à son emplaçement, reste plus qu'a lui mettre une échapement "Sheila" :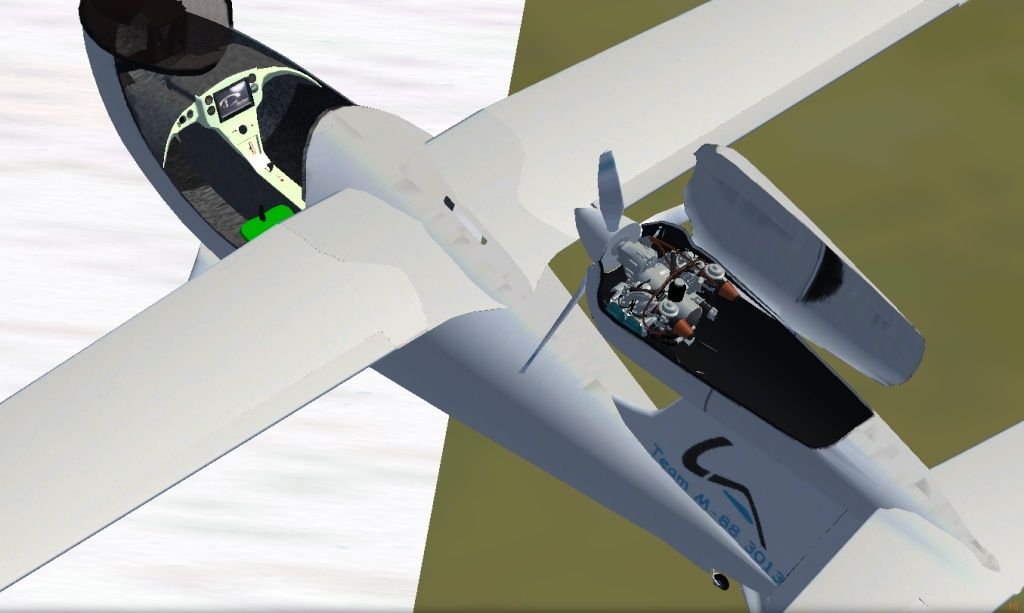
Non, parceque l'échapement de l'EchoAir Experience, comment dire........... y dépasse un peu quand même
et en plus, sur le Pteria, il sort en haut
Pas de nouvelles de LISA Airplanes pour une autorisation.
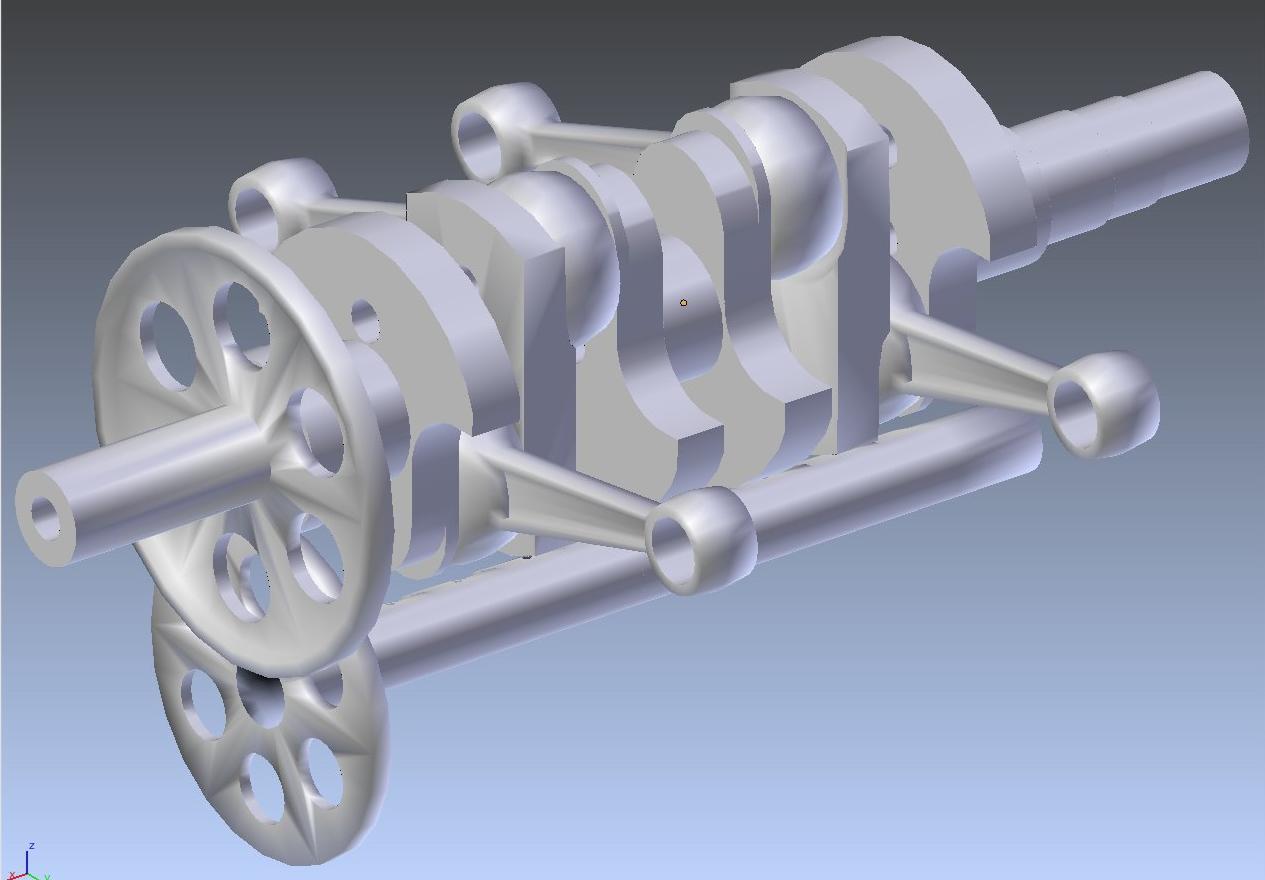
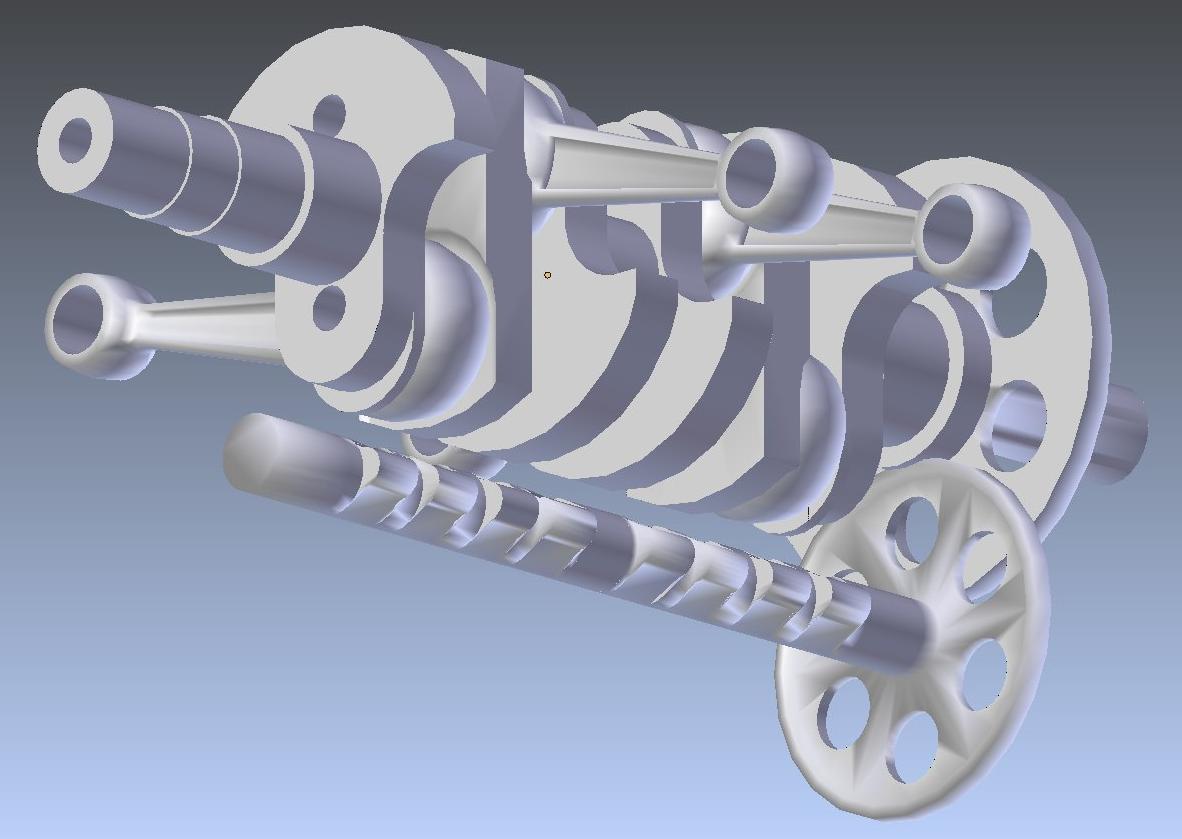
Je viens de voir un nouveau projet qui a le même moteur, donc, pendant mes poses du développement du projet actuel (cockpit du Breguet 765 Sahara), je vais essayer de refaire une modélisation de ce moteur. J'ai de la doc et des plans. Je l'avais pratiquement fini quand j'ai bêtement perdu mes fichiers 3D.
A suivre ................
]]>pour les sons "et autres", c'est à dire DR400, nous avons l'aval de Helijah et Patten.
Mais c'est vrai que le son du Rotax 912 est un peu plus métallique et moins puissant (point de vue bruit par rapport à la puissance).
Pour le ralenti, je ne suis pas pilote, donc je ne sait pas, mais c'est vrai que logiquement, si c'est un hélice seulement réglable au sol, on ne peux pas réduire le pas pour l’atterrissage, donc on est obligé d'avoir un ralenti suffisamment bas pour que l'hélice ne tire plus.
Ce qui arrive souvent dans la réalité, c'est que le ralenti est trop bas manette à zéro (surtout à froid), ça cogne ==> on remet un poil de gaz.
Quant au FDM, cela ne me pose pas de problème a priori si tu préfères + / - 1400 RPM. Il suffit de dire combien, c'est facile à essayer. Actuellement, il est vers 930 RPM.
Il ne faut pas non plus que le ralenti soit trop élevé car le risque est d'avoir du mal à perdre de la vitesse à l'atterro.
Comme tu le vois, j'avoue ne pas être très arrêté (je ne me souviens pas très bien, il faudra que je regarde quand j'y retournerai).
De toutes façons, on peut se tromper sans grandes conséquences, et c'est en principe facile à arranger.
Au fait, bien tes sons de Rotax et autres, Merci !
]]>Pour les valeurs et réglages je vous laisse faire, cela touche plus votre partie dans les FDM que la 3D ou les fichiers Xml des instruments.
J'ai cité 1400rpm car c'est ce qui est marqué dans les manuels Rotax.
Maintenant, c'est vous qui me dites ce qui vous va le mieux. Je peux modifier à volonté la valeur de début et fin de chaque zone, voir supprimer les couleurs que j'ai rajoutées (Bleue et verte).
En palier, Poids 1400 lb, en lisse:
135 kt : 5800 RPM (78 hp),
Pleins gaz : vitesse max 150 kt (c'est déjà nettement plus raisonnable). Mais 6470 RPM, 107 hp (évidemment, on est dans le rouge).
Taux de montée :
Poids 1400 lb : 1000 - 1100 ft/mn à 75 - 80 kt,
Poids 940 lb : 1500 - 1600 ft/mn à 80 - 85 kt
Meilleure finesse (rappel) env. 20 (réglé pour cette valeur) de 60 à 70 kt (gamme de vitesses devient plausible).
[EDIT] Il me semble trop sensible aux petits mouvement du manche en pitch, et fait des oscillations de rappel.
J'ai essayé -18 en amortissement
<function name="aero/moment/Pitch_damp">
<description>Pitch moment due to pitch rate</description>
<product>
<property>aero/qbar-psf</property>
..................
<value>-18</value> <!-- initial -12 -->je trouve que ça va mieux.
]]>J'ai fait des calculs de traînée, mais sur tableur avec les coefficients de FG (donc assez "théoriques", validés par comparaison à mes mesures précédentes mais dont la capacité de prévision demande encore à être confirmée).
Je viens de m'apercevoir que
<function name="aero/force/Drag_elevator">
<description>Drag due to Elevator Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<abs><property>fcs/elevator-pos-norm</property></abs>
<value>0.04</value>
</product>
</function>est calculée avec Sw-sqft, cad que la traînée Elevator Deflection est quantifiée avec la surface alaire ! Ceci lui donne une traînée parfois égale à celle de forme de l'avion, décroissant lentement avec la vitesse.
[EDIT] Je m'aperçois que cette formulation est générée par Aeromatic.
A mon avis, il faudrait mettre
<property>metrics/Sh-sqft</property>(Sh-sqft = htailarea : surface plan fixe horizontal, 6 fois moins). Et peut-être même diminuer un peu le coefficient (traînée à voir comparativement à l'avion).
Je n'arrive pas à croire que (comme ici à la meilleure finesse) l'elevator puisse générer autant de traînée que la forme de l'avion.
Lionel, je pense dire vrai, mais si tu pouvais exercer un regard critique sur mon raisonnement et les ordres de grandeur, je préfèrerais ![]() .
.
La diminution de traînée elevator devrait permettre d'augmenter en compensation la traînée "de forme" (qui, elle, est partiellement affectée de la vitesse au carré) donc de diminuer la vitesse max atteinte pleins gaz. Par la même occasion, elle devrait baisser la vitesse de meilleure finesse. Tout dans le bon sens, à voir de combien.
D'après mes pré-calculs (à confirmer, évidemment),
<function name="aero/force/Drag_basic">
<description>Drag at zero lift</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<value>2.2</value><value> 2.2 à 2.4 (au lieu de 1.3) devrait convenir pour meilleure finesse 20 vers 65 - 70 kt.
[EDIT] Confirmé. <value> 2.2 pour "Drag at zero lift" avec Sh-sqft pour "Drag due to Elevator Deflection" convient (meilleure finesse = 20 de 60 à 70 kt). Vous pouvez mettre ça dans vos FDM si vous voulez.
L'ennui est qu'il faudra aussi refaire l'hélice (l'allonger) pour qu'elle atteigne 5800 RPM à 135 kt et non avant.
Je regarde tant que je peux mais....
]]>Aussi, si je peux encore, pour le ralenti tu veux un peu moins (diode bleue) ou un peu plus (diode verte) de 1400 RPM ?
]]>